Projects
*
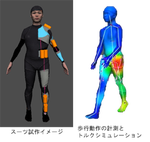



Evaluation of Assistive technologies using Simulation
Research on experimental verification and simulation methods of power assist suits
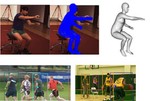
Human Postures Estimation / Motion Recognition and Tracking
Study on human posture estimation using deep learning
Motion Retargeting
Development of a method to realize human-like movements with a humanoid robot
Multi-contact locomotion
Development of planning and control methods for movements involving contact with the environment using limbs
Object Recognition using Deep-Learning
Study on 6-DOF attitude recognition algorithm of object using deep learning